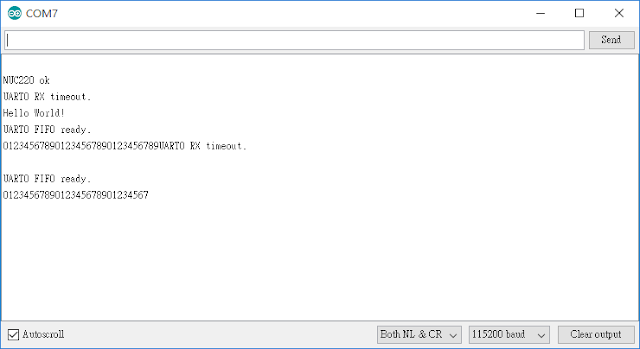
NUC200 NUC220接收&處理GPS之資料
透過MCU的UART接收GPS的資料,然後透過字串處理解讀NMEA GPRMC #include "stdlib.h" #include "stdio.h" #include "string.h" #include "NUC200Series.h" #define PLL_CLOCK 48000000 char gps_data[512] = { 0 }; int flag = 0; struct { char _gprmc[10]; char utc_time[10]; char status[10]; char latitude_value[10]; char latitude[10]; char longtitude_value[10]; char longtitude[10]; char speed[10]; char azimuth_angle[10]; char utc_date[10]; char declination_value[10]; char declination[10]; char check_sum[10]; } gprmc = { 0 }; void SYS_Init(void) { /*---------------------------------------------------------------------------------------------------------*/ /* Init System Clock */ /*---------------------------------------------------------------------------------------------------------*/ /* Enable Internal RC 22.1184MHz clock */ CLK_EnableXtalRC(CLK_PWRCON_OSC22M_EN_Msk);...